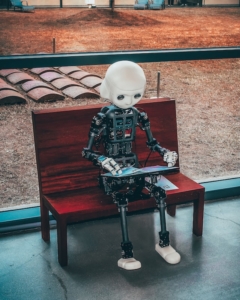
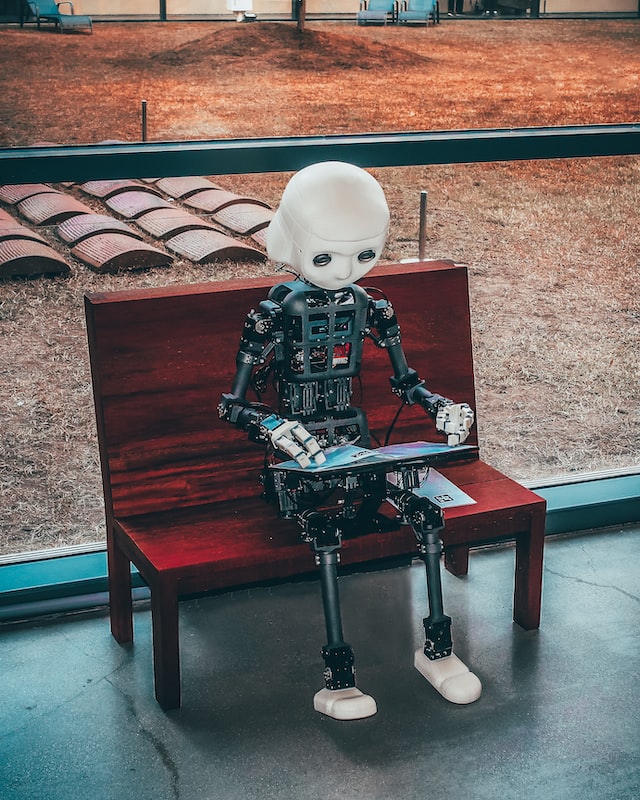
安定した猫の歩行を実現「動物の四足歩行ロボットプラットフォーム」
動物の神経筋の動きを再現できる四足歩行ロボットプラットフォームが開発されました。
Since experiments using animals are strictly controlled and restricted in terms of animal protection, it is difficult to study animal locomotion. So, it is still unknown how nerve systems discovered in prior research are integrated (i.e., how reflex circuits responsible for animal locomotion are integrated) in the animal body.
参照元:https://resou.osaka-u.ac.jp/en/research/2021/20210423_1
– 大阪大学 Osaka University. Apr 23, 2021 –
大阪大学の研究グループは、動物の神経筋の動きを再現できる四足歩行ロボットプラットフォームを開発し、このロボットを使った歩行実験において、反射回路から安定した歩容と猫の歩行実験行動が出現することを発見しました。
この研究成果は、Frontiers in Neuroroboticsに掲載されました。
動物の安定した歩行は、脳や脊髄などの複雑な神経系によって生み出されると考えられていましたが、最近の研究では、反射回路だけで安定した歩行が生み出されることがわかってきました。
研究者たちは、猫の安定した歩行運動を生み出す反射回路の候補を発見し、ロボットやコンピューターシミュレーションを用いて猫の運動制御を再現することで、猫の運動メカニズムを研究しています。
動物を使った実験は、動物愛護の観点から厳しく管理され、制限されているため、動物の運動を研究することは難しいです。
そのため、先行研究で発見された神経系が、動物の体内でどのように統合されているのか(動物の運動を担う反射回路がどのように統合されているのか)は、まだ不明です。
谷川豊明氏は、指導教員である増田洋一助教と石川正人教授とともに、コンピュータを用いて動物の運動制御を再現できる4足歩行ロボットを開発しました。
この四足ロボットは、動物の柔軟性を再現するための高背駆動の脚と、トルク制御可能なモーターで構成されており、動物の筋肉の特徴を再現することができます。
そのため、動物の代わりにこのロボットを使ってさまざまな実験を行うことができます。
研究チームは、ロボット実験によって猫の安定した歩行の生成に寄与する反射回路を探索した結果、脚の軌跡と安定した歩行パターンを生成できる単純な反射回路を発見し、これを “股関節伸筋と膝関節伸筋の相互興奮性反射 “と名付けました。
今回の研究で、研究者たちは次のことを発見しました。
- ロボットの各脚にレシプロ回路を再現するだけで、安定した歩行動作を生成した。
- 相互興奮回路が遮断されると、ロボットの歩行が不安定になった。
- 相互興奮回路を刺激すると、「立脚相の延長」と呼ばれる現象が発生した。
この結果は、この回路が猫の歩行を担う重要な要素であることを示唆しています。
このグループの研究成果は、生物学とロボット工学の両分野に役立つものです。
生物学に新しい知識をもたらすだけでなく、将来的にロボット動物が本物の動物の代わりになることができれば、より多くの科学者がさまざまな実験条件下で動物の運動メカニズムを研究する機会を得ることができます。
また、ロボットの構造を動物に近づけることで、動物と同じような動きや操作をするロボットを作るための基礎技術の開発にもつながります。
共著者の増田洋一氏は話します。
「実験動物を使わずに動物の知識を得ることは、動物と暮らす人間にとっても意義があります。動物の構造や運動を模倣したロボットを作ることで、ロボット工学と生物学をさらに融合させることが、動物や人間の行動原理を理解するための第一歩になるかもしれません。」



関連記事




新着記事


よく読まれている記事
-
 なぜタイピングより手書きの方が、記憶に定着するのか
なぜタイピングより手書きの方が、記憶に定着するのか -
どんな曲が好き?「 音楽の好みと性格の関連性は普遍的 」
-
視覚と意思決定領域の結びつきが強い「鮮明なイメージ能力がある人」
-
「触覚が敏感な部位はなぜあるのか」触覚メカニズムが解明される
-
不活性化されたリチウムイオン電池を甦えさせる「復活するリチウムイオン電池」
-
記憶が脳に保存される新しい理論「MeshCODE理論」が開発される
-
大面積有機フォトダイオードに置き換わる?「シリコンフォトダイオード技術」
-
幸福度を7%上げる「旅行の仕方」
-
「世界最長寿記録を更新し132歳まで生きる人が出現する」ベイズ統計学予測
-
組織の中で行われたインシビリティ(非礼な言動)を軽視してはいけない理由






N E W S & P O P U L A R最 新 記 事 & 人 気 記 事
WHAT'S NEW !!
-


男女ともに長生きになる「男女平等」
【男女ともに長生きになる「男女平等」】 権利とは人間が作り出した構造ですが、男女平等が進むと男女ともに長生きになるようです。 The first global study to investi... -

他者を犠牲にして利益を取る・利益を度外視して他者への害を取り除く
【他者を犠牲にして利益を取る・利益を度外視して他者への害を取り除く】 他者を犠牲にして自分の利益を選ぶ、自分にとって利益は少ないが他者への害を防ぐ、道徳的なに... -

「寿命を延ばす」良質な睡眠
【「寿命を延ばす」良質な睡眠】 良質な睡眠をとることは、寿命を何年も長くする可能性があります。 Getting good sleep can play a role in supporting your heart and... -
見極める力を養う「チャットボットの精度」
【見極める力を養う「チャットボットの精度」】 ChatGPTをはじめ、チャットボットの精度は人が書いたものかどうかわからない程までの水準になっています。 The most rec...
News
- 新着記事 -
Popular
- 人気記事 -
H A P P I N E S S幸 福
人気 (❁´ω`❁)




























M E A L食 事


























B R A I N脳
人気 (❁´ω`❁)


























H E A L T H健 康





















人気 (❁´ω`❁)
-

人体・脳
健康な脳を保ち老化を遅らせる「アマゾンの先住民族ツィマネ族の生活習慣」
【健康な脳を保ち老化を遅らせる「アマゾンの先住民族ツィマネ族の生活習慣」】 ボリビア・アマゾンの先住民族であるツィマネ族が、アメリカやヨーロッパの人々に比べて... -

社会
自制心が健康と若さをもたらす理由
【自制心が健康と若さをもたらす理由】 デューク大学の研究チームは、自制心が心身に及ぼす影響を調査しました。 1000人を出生から45年間に渡って追跡した大規模調査で... -

健康
高強度インターバルトレーニングは、適度な運動よりも心臓を強化する
【心臓を強化する高強度インターバルトレーニング】 ノルウェー科学技術大学の研究によると、トレーニングの強度が、病気の重症度を軽減し、心臓機能を改善し、作業能力...
-
人体・脳
健康な脳を保ち老化を遅らせる「アマゾンの先住民族ツィマネ族の生活習慣」
【健康な脳を保ち老化を遅らせる「アマゾンの先住民族ツィマネ族の生活習慣」】 ボリビア・アマゾンの先住民族であるツィマネ族が、アメリカやヨーロッパの人々に比べて... -
社会
自制心が健康と若さをもたらす理由
【自制心が健康と若さをもたらす理由】 デューク大学の研究チームは、自制心が心身に及ぼす影響を調査しました。 1000人を出生から45年間に渡って追跡した大規模調査で... -
健康
高強度インターバルトレーニングは、適度な運動よりも心臓を強化する
【心臓を強化する高強度インターバルトレーニング】 ノルウェー科学技術大学の研究によると、トレーニングの強度が、病気の重症度を軽減し、心臓機能を改善し、作業能力...
J O B仕 事
人気 (❁´ω`❁)













































T E C H N O L O G Y技 術
















人気 (❁´ω`❁)